


Hi everyone! As you may already know (if you don't then I advice you to learn it), in 2D geometry it is convenient to use complex numbers to handling points operations and rotations. Now I would like to tell you about similar construction, which allows you to work efficiently with 3D geometry, in particular to use vectors and linear operations on them, calculate many popular operations (like dot or cross products) and maintain rotations in 3D space.
Let  — are vectors in 3D space. Following notation from analytical geometry will be used:
— are vectors in 3D space. Following notation from analytical geometry will be used:
Dot product:
 , where
, where  — is the angle between
— is the angle between  and
and  in their common plane,
in their common plane,  — length of vector .
— length of vector .Cross product:
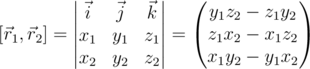 , where
, where  — unit vectors, directed along
— unit vectors, directed along  ,
,  and
and  axes. In 3D space cross product is a vector having length
axes. In 3D space cross product is a vector having length  and directed orthogonally to their common plane in such way that if you'll watch on vectors from the endpoint of cross product, shortest rotation from to will be counter-clockwise.
and directed orthogonally to their common plane in such way that if you'll watch on vectors from the endpoint of cross product, shortest rotation from to will be counter-clockwise.
So, quaternion — is hypercomplex number, which can be represented as  , where
, where  — are real numbers and
— are real numbers and  — are imaginary units. We can define multiplication operation on quaternions with following equality
— are imaginary units. We can define multiplication operation on quaternions with following equality  . The whole quaternionic multiplication table can be derived from this identity:
. The whole quaternionic multiplication table can be derived from this identity:
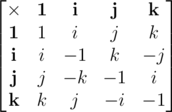
Assuming that quaternion multiplication is distributive over addition ( ), we can multiply the quaternions, "opening parenthesis". Note that quaternionic multiplication will be associative (
), we can multiply the quaternions, "opening parenthesis". Note that quaternionic multiplication will be associative ( ), but in common case not commutative (there are
), but in common case not commutative (there are  such that
such that  ).
).
Quaternions can be also represented as  , where
, where  — is vector of 3D space with unit vectors . Components
— is vector of 3D space with unit vectors . Components  and
and  are called scalar and vector parts of quaternions. Assume we have quaternions
are called scalar and vector parts of quaternions. Assume we have quaternions  and
and  . Then their multiplication can be represented as
. Then their multiplication can be represented as  . Consider multiplication of two quaternions with zero scalar parts.
. Consider multiplication of two quaternions with zero scalar parts.

 .
.
Note that it can be shortly written as  . Thus we have following formula for quaternionic multiplication:
. Thus we have following formula for quaternionic multiplication:

Finally note that since  , quaternion
, quaternion  can be represented in form
can be represented in form  , where
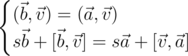
, where  — are complex numbers. Also note that since
— are complex numbers. Also note that since  , we have identity
, we have identity  or, introducing notation
or, introducing notation  :
:  . Thus multiplication of quaternions
. Thus multiplication of quaternions  and
and  can be represented as
can be represented as  . Number , introduced earlier, is called conjugated to complex number
. Number , introduced earlier, is called conjugated to complex number  . So we have another one formula for quaternion multiplication:
. So we have another one formula for quaternion multiplication:

Let's show that any non-zero quaternion is invertible, i.e. for each quaternion  there is inverse
there is inverse  such that
such that  . In this case we can divide quaternions by multiplicating with inverse element. Like in complex numers we can introduce for quaternion
. In this case we can divide quaternions by multiplicating with inverse element. Like in complex numers we can introduce for quaternion  conjugated quaternion
conjugated quaternion  . From that formula we can see that
. From that formula we can see that  . Thus we can introduce quaternionic norm (which is generalisation of length):
. Thus we can introduce quaternionic norm (which is generalisation of length):  and inverse element
and inverse element  . Note that
. Note that  . Indeed from multiplication formula we get
. Indeed from multiplication formula we get  . From here we can see
. From here we can see  and
and  .
.
Now we are ready to learn about the most useful property of quaternions which is handling rotations in 3D space. From now on we will consider vectors to be quaternions with zero scalar part. Let's introduce conjugation operation of vector a by quaternion g the result of which will be vector [1]  . This identity is equivalent to the following:
. This identity is equivalent to the following:  . Let
. Let  , then we can get
, then we can get  . Considering scalar and vector parts separately we will get:
. Considering scalar and vector parts separately we will get:
Note that because ||ab|| = ||a||·||b|| we can get that norms of vectors  and
and  are equal. First equation of the system means that orthogonal projections on axis are equal for and . Set of vectors with same norm and projection on some direction form a circumference around that direction. Thus we see that can be obtained from by its rotation around on some angle. Let's find it. From now on we will say that rotation is clockwise or counter-clockwise depending on what it's like if we watch it from the endpoint of vector around which rotation is happening.
are equal. First equation of the system means that orthogonal projections on axis are equal for and . Set of vectors with same norm and projection on some direction form a circumference around that direction. Thus we see that can be obtained from by its rotation around on some angle. Let's find it. From now on we will say that rotation is clockwise or counter-clockwise depending on what it's like if we watch it from the endpoint of vector around which rotation is happening.
Let's assume that  . If it's not true, we can divide
. If it's not true, we can divide  by square root of its norm, it will not affect . Now we can assume that
by square root of its norm, it will not affect . Now we can assume that  , where
, where  . Also using first equation and using notation
. Also using first equation and using notation 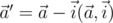 and
and  , we can transform second equation in following way:
, we can transform second equation in following way:  . (On the other hand we subtracted
. (On the other hand we subtracted  from both sides, on the other one since
from both sides, on the other one since  we can see that
we can see that  )
)
Note that  and
and  are lying in the plane orthogonal to , thus, this is the rotation plane. Now we should see that
are lying in the plane orthogonal to , thus, this is the rotation plane. Now we should see that  is vector rotated
is vector rotated  around vector
around vector  clockwise. Thus left part of second equation is , rotated around clockwise on angle , and the right one is , rotated around counter-clockwise on . Thus we see that is rotated around counter-clockwise on
clockwise. Thus left part of second equation is , rotated around clockwise on angle , and the right one is , rotated around counter-clockwise on . Thus we see that is rotated around counter-clockwise on  .
.
To sum up: quaternion with unit norm
 has such property that for each expression
has such property that for each expression  specifies vector rotated around on counter-clockwise.
specifies vector rotated around on counter-clockwise.[1]  . Scalar part of this product equals to
. Scalar part of this product equals to  .
.
And now the implementation. Ideone: #BBOx9H
// To begin, we introduce the notation for the class and its elements, which we will use.
typedef double ftype;
typedef complex<ftype> point;
typedef complex<point> quater;
#define qA real()
#define qB imag()
#define qs qA.real()
#define qx qA.imag()
#define qy qB.real()
#define qz qB.imag()
const ftype pi = acos(-1.);
const ftype eps = 1e-9;
// Multiplication via formulas in complex terms.
quater operator * (quater a, quater b)
{
return {{a.qA * b.qA - a.qB * conj(b.qB)},
{a.qA * b.qB + a.qB * conj(b.qA)}};
}
// Conjugated element
quater conj(quater a)
{
return {conj(a.qA), - a.qB};
}
// Quaternionic norm.
ftype norm(quater a)
{
return (a * conj(a)).qs;
}
// Length.
ftype abs(quater a)
{
return sqrt(norm(a));
}
// Dividing via inverse element.
quater operator / (quater a, quater b)
{
return a * conj(b) / point(norm(b));
}
// Quaternion from vector coordinates.
quater vec(ftype x, ftype y, ftype z)
{
return {{0, x}, {y, z}};
}
// Basis vectors.
const quater ex = vec(1, 0, 0);
const quater ey = vec(0, 1, 0);
const quater ez = vec(0, 0, 1);
// Vector part of quaternion.
quater vec(quater a)
{
return a -= a.qs;
}
// Dot product.
ftype dot(quater a, quater b)
{
return -(a * b).qs;
}
// Cross product.
quater cross(quater a, quater b)
{
return vec(a * b);
}
// Triple (mixed) product.
ftype mix(quater a, quater b, quater c)
{
return dot(a, cross(b, c));
}
// Conjugation of vector a by quaternion g.
quater conj(quater a, quater g)
{
return g * a / g;
}
// Quaternion representing rotation around i on phi counter-clockwise.
quater rotation(quater i, ftype phi)
{
return point(cos(phi / 2)) + i * point(sin(phi / 2));
}
// Rotate a around i counter-clockwise.
quater rotate(quater a, quater i, ftype phi)
{
return conj(a, rotation(i, phi));
}
// Check if two vectors are equal.
bool cmp(const quater &a, const quater &b)
{
return abs(a - b) < eps;
}
// Any vector which is orthogonal to v.
quater ortho(quater v)
{
if(abs(v.qy) > eps)
return vec(v.qy, -v.qx, 0);
else
return vec(v.qz, 0, -v.qx);
}
// Quaternion representing rotation from a to b via minimal angle.
quater min_rotation(quater a, quater b)
{
a /= abs(a);
b /= abs(b);
if(cmp(a, -b)) // Degenerate case :(
return rotation(ortho(b), pi);
else
return conj(a * (a + b));
}
// Angle of rotation from [-pi; pi] defined by quaternion.
ftype get_angle(quater a)
{
a /= abs(a);
return remainder(2 * acos(a.qs), 2 * pi);
}
// Quaternion representing rotation which turns nx in x, ny in y and [nx, ny] in z.
quater basis_rotation(quater nx, quater ny)
{
nx /= abs(nx);
ny /= abs(ny);
quater a = min_rotation(nx, ex);
ny = conj(ny, a);
quater b = min_rotation(ny, ey);
if(cmp(ny, -ey))
b = rotation(ex, pi);
return b * a;
}







can u post some questions which can be solved by this concept ?
http://acm.timus.ru/problem.aspx?space=1&num=1653
I solved this one recently
Codeforces Global Round 9, Problem I
:D
Auto comment: topic has been updated by adamant (previous revision, new revision, compare).