


430A - Точки и отрезки (легкая версия)
The problem asks you to output “-1” if there is no solution. A natural question is now: “when there is no solution”? Try to come up with a test like this!
After some analysis, you’ll see anyhow we draw the points and the lines, there will always be a solution. By manually solving small cases, you might already have found the pattern. But for now, let’s assume anyhow we draw points and lines, there will always be a solution. Let’s have a fixed set of points. Then, anyhow we draw a line, there should still be a solution. So, we need to find a coloring of points, such as for every line, |number of red points which belong to it – number of blue points which belong to it| <= 1.
Suppose anytime you color a point with red you assign it +1 value. Also, anytime you color it with blue you assign it -1 value. Then, for a segment, the drawing is good if S = sum of values assigned to points that belong to segment is between -1 and 1 (in other words |S| <= 1). Let’s sort points increasing by abscissa. It’s useful because now, for a segment, there will be a contiguous range of points that belong to that segment. For example, suppose my current segment is [3, 7] and the initial set of points was {4, 1, 5, 2, 8, 7}. Initially, points that belong to the segment would be first, third and sixth. Let’s sort the points by abscissa. It looks like {1, 2, 4, 5, 7, 8}. You can see now there is a contiguous range of points that belongs to [3, 7] segment: more exactly third, fourth and fifth.
We reduced problem to: given an array, assign it either +1 or -1 values such as, for each subarray (contiguous range), the sum S of subarray’s elements follows the condition |S| <= 1. Before reading on, try to come up with an example by yourself.
My solution uses the pattern: +1 -1 +1 -1 +1 -1 ... Each subarray of it will have sum of its elements either -1, 0 or 1. How to proof it? When dealing with sums of subarrays, a good idea is to use partial sums. Denote sum[i] = x[1] + x[2] + ... + x[i]. Then, sum of a subarray [x, y] is sum[y] – sum[x – 1]. Partial sums for the pattern looks like: 1 0 1 0 1 0 .... Hence, there are 4 possible cases:
1/ sum[x – 1] = 0 and sum[y] = 0. sum[y] – sum[x – 1] = 0
2/ sum[x – 1] = 1 and sum[y] = 1. sum[y] – sum[x – 1] = 0
3/ sum[x – 1] = 0 and sum[y] = 1. sum[y] – sum[x – 1] = 1
4/ sum[x – 1] = 1 and sum[y] = 0. sum[y] – sum[x – 1] = -1
Hence, each subarray sum is either -1, 0 or 1. So, general algorithm looks like: sort points by abscissa, assign them red, blue, red, blue, ... and then sort them back by original order and print the colors.
430B - Игра с шарами
This is an implementation problem. There is not so much to explain. Perhaps the trick at implementation problems is to divide code into smaller subproblems, easy to code and then put them together. I don’t know if this is the universally truth, but this is how I approach them. Here, there are two main parts: the part when you insert a ball between 2 balls and the part when you see how many balls are destroyed after the move. We can keep an array a[] with initial configuration of balls, then for each insertion create an array b[] with current configuration after the insertion. If my ball is inserted after position pos, b is something like this: b = a[1....pos] + {my_ball} + a[pos+1....n].
For now we have array b[] and we need to know how many balls will disappear. The problem statement gives us an important clue: no 3 balls will initially have the same color. This means, any time, at most one contiguous range of balls of same color will exist with length at least 3. If it exists, we have to remove it. Then, we have to repeat this process.
So algorithm is something like bubble sort: while b[] array has changed last step, continue algorithm, otherwise exit it. Now, search an i for which b[i] = b[i + 1] = b[i + 2]. Then, take the maximum j > i for which b[k] = b[i], with i < k <= j. You have to remove from b[] the subarray [i...j] and add j – i + 1 to the destroyed balls. You’ll need to return this sum – 1, because the ball you added wasn’t there at beginning. Pay attention on case when you can’t destroy anything, you need to output 0 instead of -1. There are O(n) positions where you can insert the new ball, for each of them there are maximal O(n) steps when balls are deleted and deleting balls takes maximal O(n) time, so overall complexity is O(n ^ 3).
Note: in my solution, I don’t actually do deletion. If I have to delete a range [i, j] I create a new array c[] = b[1...i – 1] + b[j+1....n] and then copy c[] into b[] array. This guarantees O(n) time for deletion.
429A - Дерево XOR
There is something to learn from “propagating tree” problem, used in round #225. It’s how the special operation works. I’ll copy paste the explanation from there (with some modification, corresponding to the problem):
Let’s define level of a node the number of edges in the path from root to the node. Root (node 1) is at level 0, sons of root are at level 1, sons of sons of root are at level 2 and so on. Now suppose you want to do a special operation to a node x. What nodes from subtree of x will be flipped? Obviously, x will be first, being located at level L. Sons of x, located at level L + 1 will not be flipped. Sons of sons, located at level L + 2, will be flipped again. So, nodes from subtree of x located at levels L, L + 2, L + 4, ... will be flipped, and nodes located at levels L + 1, L + 3, L + 5 won’t be flipped. Let’s take those values of L modulo 2. All nodes having remainder L modulo 2 will be flipped, and nodes having reminder (L + 1) modulo 2 will not. In other words, for a fixed x, at a level L, let y a node from subtree of x, at level L2. If L and L2 have same parity, y will be flipped, otherwise it won’t. We’ll use this fact later. For now, let’s think what should be our first operation. Let’s consider some nodes {x1, x2, ..., xk} with property that x1 is son of x2, x2 is son of x3, ... xk-1 is son of xk and parity of levels of these nodes is the same. Suppose by now we fixed {x1, x2, ..., xk-1} (their current value is equal to their goal value), but xk is still not fixed. After some time, we’ll have to fix xk. Now, by doing this, all nodes {x1, x2, ..., xk-1} will get flipped and hence unfixed. We’ve done some useless operations, so our used strategy is not the one that gives minimal number of operations.
What we learn from this example? Suppose I want to currently fix a node X. There is no point to fix it now, unless all ancestors Y of X with property level(Y) = level(X) (mod 2) are fixed. But what if an ancestor Y of X is not fixed yet and level(Y) != level(X) (mod 2)? Can I fix node X now? The answer is yes, as future operations done on Y won’t affect X. But, by same logic, I can firstly fix Y and then fix X, because again operations done on Y won’t affect X. We get a nice property: there is no point to make an operation on a node X unless all ancestors of X are fixed.
How can we use this property? What should be the first operation? We know that node 1 is the root, hence it always won’t have any ancestor. All other nodes might have sometimes not fixed ancestors, but we know for sure, for beginning, node 1 won’t have any unfixed ancestor (because it won’t have any). So, for beginning we can start with node 1. More, suppose node 1 is unfixed. The only way to fix it is to make an operation on it. Since it’s unfixed and this is the only way to fix it, you’ll be obligated to do this operation. This means, in an optimal sequence of operations, you’ll be obligated to do this operation, too.
So, if node 1 was unfixed, we did an operation on it. If it was already fixed, we’re done with it. What are next nodes we know for sure that will have all ancestors fixed? Sons of 1, because they have only one ancestor (node 1), which we know it’s fixed. We can only fix them by doing operations of them (doing operations on node 1 / sons of them won’t affect them). Since eventually they have to be fixed and only way to be fixed is to do an operation on them, in an optimal sequence of operations, we’ll have to make operations on them. Let’s move on. What are next nodes that we know for sure all ancestors of them will be fixed? Sons of sons of 1. We can fix them by doing an operation of them, or by doing an operation on 1. But doing an operation on 1 isn’t helpful, because even if it fixes this node, it unfixes 1. Then, you’ll have to do one more operation on 1, which will unfix current node, so we do two useless operations. It turns out, the only way to fix them is to do an operation on them.
Generally, suppose all ancestors of node x are fixed. We get the current value of node x after the operations done on ancestors of x. If the current value is not the expected one, we’ll have to do an operation on node x (this is the only way to fix the node x). Now, after node x is fixed, we can process sons of it. This strategy guarantees minimal number of operations, because we do an operation only when we’re forced to do it.
This leads immediately to an O(N ^ 2) algorithm, by every time we need to do an operation to update it to nodes from its subtree. How to get O(N)? Suppose we are at node x and want to know its current value after operations done for its ancestors. Obviously, it is defined by initial value. If we know number of operations done so far by even levels for its ancestors, number of operations done so far by odd levels and current level, we can determine the current value. Suppose these values are (initial_value, odd_times, even_times, level). We observe that 2 operations cancel each other, so we can take this number modulo 2. If level mod 2 = 0, then only even_times will matter, and current_value = (initial_value + even_times) % 2. Otherwise, current_value = (initial_value + odd_times) % 2.
We can send (even_times, odd_times and level) as DFS parameters, so current_value can be calculated in O(1), and overall complexity is O(N).
429B - Тренировка
The particularity of this problem which makes it different by other problem of this kind is that paths need to cross exactly one cell and Iahub can go only right and down, Iahubina can go only right and up. Let's try to come up with a solution based on these facts. A good start is to analyze configurations possible for meeting cell. Iahub can come either from right or down and Iahubina can come either from right or up. However, if both Iahub and Iahubina come from right, they must have met in other cell as well before (the cell in the left of the meet one). Similarly, if one comes from up and other one from down, their paths will cross either on upper cell, lower cell or right cell.
Only 2 possible cases are: Iahub comes from right, Iahubina comes from up or Iahub comes from down, Iahubina comes from right. By drawing some skatches on paper, you'll see next cell visited after meeting one will have the same direction for both of them. More, they will never meet again. So Iahub comes from right, goes to right, Iahubina comes from up, goes to up or Iahub comes from down, goes to down and Iahubina comes from right, goes to right.
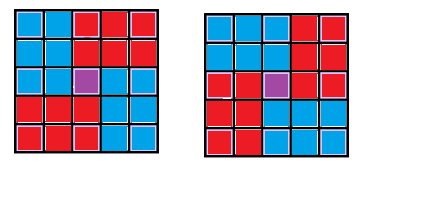
In the drawing, Iahub's possible visited cells are blue, Iahubina's possible visited cells are red and meeting cell is purple. Denote (X, Y) meeting cell.
For first case, Iahub comes from (1, 1) to (X, Y — 1) by going down or right. Next, he goes from (X, Y + 1) to (N, M) by going down or right. Iahubina goes from (M, 1) to (X + 1, Y) by going up or right and then from (X — 1, Y) to (1, M) by going with same directions. In second case, Iahub goes from (1, 1) to (X — 1, Y) and then from (X + 1, Y) to (N, M) and Iahubina goes from (M, 1) to (X, Y — 1) and then from (X, Y + 1) to (1, M).
We can precalculate for dynamic programming matrixes and we're done.
dp1[i][j] = maximal cost of a path going from (1, 1) to (i, j) only down and right.
dp2[i][j] = maximal cost of a path from (i, j) to (1, m) going only up and right.
dp3[i][j] = maximal cost of a path from (m, 1) to (i, j) going only up and right.
dp4[i][j] = maximal cost of a path from (i, j) to (n, m) going only down or right.
And here is my full implementation of recurrences (C++ only):
for (int i = 1; i <= n; ++i)
for (int j = 1; j <= m; ++j)
dp1[i][j] = a[i][j] + max(dp1[i - 1][j], dp1[i][j - 1]);
for (int j = m; j >= 1; --j)
for (int i = 1; i <= n; ++i)
dp2[i][j] = a[i][j] + max(dp2[i - 1][j], dp2[i][j + 1]);
for (int i = n; i >= 1; --i)
for (int j = 1; j <= m; ++j)
dp3[i][j] = a[i][j] + max(dp3[i + 1][j], dp3[i][j - 1]);
for (int i = n; i >= 1; --i)
for (int j = m; j >= 1; --j)
dp4[i][j] = a[i][j] + max(dp4[i][j + 1], dp4[i + 1][j]);Also, pay attention that meeting points can be cells (i, j) with 1 < i < n and 1 < j < m. (why?)
429C - Угадай дерево
The constrain n <= 24 immediately suggest us an exponential solution. 24 numbers seems to be not too big, but also not too small. What if we can reduce it by half? We can do this, by analyzing problem’s restriction more carefully.
The problem states that each internal node has at least two sons. After drawing some trees likes these, one may notice there are a lot of leafs in them. For a tree with this property, number of leafs is at least (n + 1) / 2. We’ll proof this affirmation by mathematical induction. For n = 1, affirmation is true. Now, suppose our tree has n nodes, and the root of it has sons {s1, s2, ..., sk}. Let’s assume subtree of s1 has n1 nodes, subtree of s2 has n2 nodes, ..., subtree of sk has nk nodes. By induction we get that s1 has at least (n1 + 1) / 2 leafs, ..., sk has at least (nk + 1) / 2 leafs. Summing up, we get that our tree has at least (n1 + n2 + ... + nk + k) / 2 leafs. But n1 + n2 + ... + nk = n – 1. So it has at least (n + k – 1) / 2 leafs. But, by hypothesis k >= 2, so our tree has at least (n + 1) / 2 leafs.
For n = 24, there will be at least 13 leafs, so at most 11 internal nodes. It looks much better now for an exponential solution! Before presenting it, we need one more observation. Suppose we sorted c[] array decreasing. Now, the father of node i can be only one of nodes {1, 2, ..., i – 1}. Nodes {i + 1, i + 2, ..., n} will have at most as much nodes as node i, so they can’t be father of i. By doing this observation we can start algorithm: start with node 1 and assign its sons. Then, move to node 2. If it does not have a father, we won’t have one, so current configuration is good. If he has a father (in this case node 1), then tree is connected so far. So we can assign children of node 2. Generally, if a node i does not have a father when it’s processed, it won’t have in future either. If it has, the tree is connected so far, so we add children of i.
Let’s introduce the following dynamic programming. Let dp[node][mask][leafs] = is it possible to create a tree if all nodes {1, 2, ..., node} have already a father, exactly leafs nodes don’t have one and internal nodes corresponding to 1 in bitmask mask also don’t have one? If you never heart about “bitmask” word, this problem is not good for you to start with. I recommend you problem E from round #191, where I explained more how bitmasks work. Back on the problem. If node has 1 in its bit from the mask, then we know for sure the tree can’t be built. Otherwise, let’s assign sons for node. We take all submasks of mask (number obtained by changing some bits from 1 to 0) and make sum of degrees for corresponding nodes. Denote this number as S. These are the internal nodes. How about the leafs? We need to have available L = c[node] – S – 1 leafs. If L is <= than leafs, we can use them. If L < 0, obviously we can’t build the tree. Will remain obviously leafs – L leafs. The new mask will be mask ^ submask. Also, we need to iterate to node + 1. If dp[node+1][mask ^ submask][leafs – L]. One more condition that needs to be considered: node needs to have at least 2 sons. This means L + cnt > 1 (where cnt are number of internal nodes used). When do we stop the dp? When c[nod] = 1. If mask = 0 and leafs = 0, then we can build the tree. Otherwise, we can’t.
Let’s analyze the complexity. There are O(2 ^ (n / 2)) masks, each of them has O(n) leafs, for each O(n) node. This gives O(2 ^ (n / 2) * n ^ 2) states. Apparently, iterating over all submasks gives O(2 ^ (n / 2)) time for each submask, so overall complexity should be O(4 ^ (n / 2) * n ^ 2). But this complexity is over rated. Taking all submasks for all masks takes O(3 ^ (n / 2)) time, instead of O(4 ^ (n / 2)) time. Why? Consider numbers written in base 3: for a mask and a submask we can assign 3 ternary digits to each bit:
0 if bit does not appear in mask
1 if bit appears in mask but not in submask
2 if bit appears in mask and in submask
Obviously, there are O(3 ^ (n / 2)) numbers like this and the two problems are equivalent, so this step takes O(3 ^ (n / 2)) and overall complexity is O(3 ^ (n / 2) * n ^ 2).
429D - Хитрая функция
Let’s define S[i] = a[1] + a[2] + ... + a[i]. Then, f(i, j) = (i – j) ^ 2 + (S[i] – S[j]) ^ 2. Trying to minimize this function seems complicated, so we need to manipulate the formula more. We know from the maths that if f(i, j) is minimized, then also f’(i, j) = sqrt ( (i – j) ^ 2 + (S[i] – S[j]) ^ 2) is also minimized. Does this function look familiar to you? Suppose you get two points in 2D plane: one having coordinates (i, S[i]) and the other one having coordinates (j, S[j]). One can see that f’(i, j) is exactly euclidean distance of those points. So, if f’(i, j) is a distance between two points in plane, when is achieved minimal f’(i, j)? For the closest two points in plane (the points which are located at minimal distance). So, having set of points (i, S[i]), we need to compute closest two points from this plane. There is a classical algorithm that does this in O(n * logn).
429E - Точки и отрезки
The problem asks you to check the property for an infinity of points. Obviously, we can’t do that. However, we can observe that some contiguous ranges on OX axis have the same rx and bx values. Like a sweep line algorithm, a possible change may appear only when a new segment begins or when an old one ends. So let’s consider set of points formed by all li reunited with set of points formed by all ri. Sort the values increasing. Suppose the set looks like {x1, x2, ..., xk}. Then ranges [0, x1) [x1, x2) ... [xk-1, xk) [xk, infinity) are the only ones that need to be considered. If we can take an arbitrary point from each range and the property is respected for all points, then the drawing is good.
We need to color segments. But each segment is a reunion of ranges like the ones from above. When you color a segment, all ranges from it will be colored too. So, after coloring the segments, for each range, |number of times range was colored with blue – number of times range was colored with red| <= 1.
It’s time to think creative. We can see ranges as vertexes of a graph and segments as edges. For example, if a segment is formed by ranges {Xi, Xi+1, ..., Xj-1, Xj} we add an undirected edge from i to j + 1. We need to color the edges. We divide the graph into connected components and apply same logic for each component. Next, by graph I’ll refer to a connected graph.
Let’s assume that our graph has all degrees even. Then, it admits an eulerian cycle. Suppose {x1, x2, ..., xk} is the list of nodes from the cycle, such as x1-x2 x2-x3 ... xk-x1 are the edges of it, in this order. We apply a rule: if xi < xi+1, we color edge between xi and xi+1 in red. Otherwise, we color it in blue. What happens for a node? Whenever a “red” edge crosses it (for example edge 1-5 crosses node 4) a “blue” edge will always exist to cross it again (for example edge 6-2 crosses node 4). This is because of property of euler cycle: suppose we started from a node x and gone in “left”. We need to return to it, but the only way to do it is an edge which goes to “right”. So, when degrees of graph are all even, for every point on OX axis, difference between rx and bx will be always 0.
Let’s solve the general case now. Some nodes have odd degree. But there will always be an even number of nodes with odd degrees. Why? Suppose the property is respected for some edges added so far and now we add a new one. There are two cases:
1/ the edge connects two nodes with odd degree. in this case, the number of nodes with odd degrees decreases by 2, but its parity does not change.
2/ the edge connects one node with odd degree and one node with even degree. Now, degree of “old” odd one becomes even and degree of “old” even one becomes odd. So number of nodes with odd degrees does not change.
So suppose the nodes with odd degrees are X1 X2 ... Xk (k is even). Assume X1 < X2 < ... < Xk. If we add one more edge to each of these nodes, an euler cycle would be possible. However, we can’t “add” edges, because edges are segments from the input. But we can imagine them. Of course, this we’ll create an imbalance between red and blue edges, but let’s see how big it is. What if we add a fictive edge between X1 to X2, between X3 to X4, ..., between X(k – 1) to Xk? In this way, all those nodes will have even degree. So for each Xi (i odd) we add a dummy vertex Yi and some dummy edges from Xi to Yi and from Yi to Xi+1. Now let’s see the effect: if the fictive edges existed, the balance would be 0. But they do not exist, so one of rx or bx will decrease. So now |rx – bx| <= 1, good enough for problem’s restrictions.







The closest point pair problem seems to work in O(n log^2 n)
It also works in . There's been at least one blog post about this on CF, and there's also a Wikipedia article and several more that can be googled.
. There's been at least one blog post about this on CF, and there's also a Wikipedia article and several more that can be googled.
Maybe it's not necessary, but I have solution of div2B which uses O(n^2) algorithm. It's enough to consider position of adding (between the same colours, it's important) and move left and right borders while we can delete balls (O(n)). I guess it works even faster because of the same colours, but I can't prove.
For div1 D, whats the O(NAmax) solution?
Just try all pairs (i, j) for which |i - j| ≤ |A|max. Surprisingly, it can pass.
ok.. this follows from the fact that [Amax^2 + 1] is an upper bound for the solution.
Div1-C can be easily solved by backtracking over each internal node's parent. If implemented well, it'll work in .
.
Seems that most of the tops have implemented exactly this solution.
Very descriptive analysis, thank you for that :)
I have an accepted O(nlogn) solution for Div1-C. I have not managed to show if it is indeed correct or if I'm just lucky with the test data. Here it is: 6596608
This is the idea:
Sort the input in descending order. The node with the largest value has to be the root. Use a max heap to represent the current tree. We begin by adding the root. Now process the remaining nodes from largest to smallest. Let's say that we want to add node i with value ci to the tree and the largest value in the tree is node j with value cj. By adding i as a child of j we can for node j assume that we will be able to complete the subtree with i as root of size ci. By making this assumption we conclude that the other children of j need to have a total size of cj - ci - 1. We can handle this by removing cj from the max heap and then adding cj - ci. We also need to add ci, since that subtree also needs to be completed. While doing this we keep track of how many children we add to each node.
Once every node has been added to the tree we check if every element in the max heap has value 1 and no node has exactly 1 child. If both are true we have successfully built the tree, otherwise it is impossible.
Unfortunately, this solution is incorrect (however, I think it's quite a good heuristic ;p). You assumed here that "the biggest" unused node should be connected with the largest available subtree, which is false.
Consider the following test:
It's not hard to see that the only way to make the tree is to connect 4 and 7 with 12 and then both threes with 7 (the leaves are obvious). However, your solution would first join 7 with 12 (OK), but then 4 with 7 (incorrect). That's why your code would output "NO" while the correct answer is "YES" ;)
However, I congratulate you for passing the final tests ;)
Here is my solution. 6602697 It's O(nMaxA),but I can't make it time_limit_exceed. Can someone make a test to make it time_limit_exceed ? Thanks.
Another approach to C-DIV1 is dynamic programming.
Firstly sort all sizes in ascending order. Let's calculate such value, can we make forest with sizes of trees s1, s2...sk respectively using first l nodes, where s1, s2...sk is partition of l. We can calculate such values for given l using values for l - 1. Upper bound on time complexity is , where p(n) is partition function.
, where p(n) is partition function.
My accepted 6603422 code.
Related link.
I used the same approach during the contest (I didn't get AC then because of a stupid bug which I fixed immediately after the contest). When considering the l-th node (with value c(l)), I considered every partition which was obtainable for the first l-1 nodes. Let's assume this partition is (s(1), ..., s(k)). I generated all the possible solutions of combining 2 or more elements of the partition such that their sum is c(l)-1 and from them I generated new partitions for the first l nodes (I used a hash to not generate multiple partitions twice). In order to generate these solutions quickly I used knapsack and the knapsack DP matrix to guide the generation of such solutions.
This solution was very fast (it had a running time of slightly more than 100 ms).
In problem D , where it states that there can't be no crossing of their path in more than one cell ? If they meet from up and down, they still meet in one cell and they go to their direction.
Can someone please explain this solution to Div1 E?
There's another solution, which is more simple, imo. Here's my attempt at explaining it: http://www.rivsoft.net/blog/codeforces-round-245/#div1.e
It's the same solution! Thanks for the explanation :)
That solution is easy to understand. Thank you!
In my opinion algorithm presented to Div1E is wrong. It is not considering integer points correctly. Consider this example: 6
1 3
3 5
2 5
2 3
3 4
1 4
Out algorithm finds a cycle 1 3 5 2 3 4 1 and then we color edges (1-3, red), (3-5, red), (2-5, blue), (2-3, red), (3-4, red), (1-4, blue) and now point 3 is covered by 4 red segments and 2 blue... This example can be solved using slightly other Euler cycle. I don't know how to handle this in general... All accepted solutions handle this case correctly, probably they are ok, but who knows. During the contest I came up with an idea of adding phony intervals and finding Eulerian path (even coded something giving some outputs), but I concentrated on intervals ends and didn't come up with a proper coloring of that cycle.
There was a typo in editorial. Please recheck this statement
For example, if a segment is formed by ranges {Xi, Xi+1, ..., Xj-1, Xj} we add an undirected edge from i to j + 1.
Correct is j + 1, not j, as it was before. Does it still look wrong?
I think I assumed it was j+1 not the j :P. Consider an easier example:
3
1 2
2 3
1 3
Are you creating a cycle 1-2-3-1 from these intervals and find an Eular cycle without adding anything? If so, |r_2 — b_2| = 1, when this should be the case when rx = bx for all points x, if I'm not mistaken.
Could you clarify what your algorithm does for the case I gave earlier?
There was a text with nothing clever
elfus doesn't do justice to the solution in this editorial,
the ranges are not [0, x1] [x1, x2] ... [xk-1, xk] [xk, infinity]
but [0, x1)(atom 0) , [x1, x2)(atom 1) ..... [xk, bigvalue) (atom k), [bigvalue, infinity)(atom k + 1, note that it's a mathematical abuse to write the interval[I, Infinity) like this : [I, Infinity])
the edges in our graph are from one atom to another and represent a segment from the input for example, the segment [xi, xj] generates an edge from atom i to atom j + 1
The solution gives the following answers for your test cases: 0 1 0 1 0 1 and 0 0 1
Corrected! Here's the official solution: https://ideone.com/urj4uv If you find more mistakes, please tell me so I can fix them.
Here's my approach for DIV1E. The main idea is to see which segments must be colored differently, which we approach in a greedy way.
First, sort the segments (first by increasing start coordinate, breaking ties by end coordinate). Now, take the first two segments, and call them A and B. Now, observe the following cases. I'll be using A.s to refer to the start coordinate, and A.e to refer to the end coordinate.
We repeat the following procedure until we have less than two segments. Now we have a graph, with nodes representing segments, and an edge between them if the nodes need to be colored differently. We can see we have a solution if and only if this graph is two-colorable. However, notice that the above procedure does not produce any cycles in the graph, so the graph we have is a tree, which we can always two-color, so we just go through this tree and assign colors.
Can someone explain this submission ? http://codeforces.com/contest/429/submission/6593728 . What logic did he use ?
deleted
deleted
Could someone explain why "paths need to cross exactly one cell" ?(div 1 B working out)
What if the matrix looks like this?
1 1 1
1 0 0
1 1 1
One can go (1, 1), (2, 1), (3, 1), (3, 2), (3, 3) and the other goes (3, 1), (2, 1), (1, 1), (1, 2), (1, 3). If they work at the same speed on each cell, then they only meet at exactly one location (2, 1). But the paths cross at more than one location.
Never mind. I just found that the announcement says so.
The problem 429C - Угадай дерево can be solved by using backtracking with branch and bound. My solution: 6793940
429D — Tricky Function I got AC by a wrong algorithm below:
editorial is really good,thnx [user:fchirika] even after 4 years!!
You're welcomed, even after 4 years :)
Editorial B: Working Out.
It says: "Also, pay attention that meeting points can be cells (i, j) with 1 < i < n and 1 < j < m. (why?)" and why not 1 <= i <= n and 1 <= j <= m?
A detailed explaination would be appreciated.
if it is not the case,then they would not be meeting at only ONE point,they will have to meet at 2 points
Best Editorial ever! Explanations are complete and very helpful.
EDIT: It isn't only me who found this Editorial far better than others on CF. right ?
Does anyone have a solution for Div. 1 D using closest pair of points that runs in time? I tried to implement it but I keep getting TLE on test case 18 even though I'm sure my solution is
O(n log n). My solution: 51115821Never mind, I forgot that I was dealing with the square of the distances so I was considering way more points than necessary.
In the Problem "429B- Working Out", Nowhere in the problem has it been described that they cant visit the same cell again. Is it that when one visits an already visited cell, the calories burnt is not counted? or, one cannot visit the the visited cell? Can someone help me with this doubt?
According to the rules set for the path,they cannot be visiting the same cell again,as they never come backwards
A very simple and easy to prove solution to Div1E:
For each segment, replace its endpoints like this: $$$l' := 2l, r':=2r+1$$$, so that no left endpoint matches no right endpoint and the relative order of segments is conserved. Now sort all the endpoints, breaking ties arbitrarily. Now we have a sequence which tells us which endpoint belongs to which segment, it may look something like this:
0 1 1 2 0 3 3 2, let's call this sequence $$$v$$$. To simplify code, we can increase right endpoints by $$$n$$$, for example, we would get0 1 5 2 4 3 7 6. Now we can solve the problem assuming that no two endpoints match — if they do match, the solution is still valid. Assign to each segment a pair of variables — $$$x_i$$$ for the opening segment and $$$x_{i+n}$$$ for the closing segment. This variable will tell us whether or not the prefix sum increases or decreases after that point (all values are $$$+1$$$ or $$$-1$$$). Clearly $$$x_i \not = x_{i+n}$$$. Also, we have $$$x_{v_{2i}} \not = x_{v_{2i+1}}$$$, because all even-length prefix sums must be equal to $$$0$$$. Now construct a graph with edges given by the above inequalities. Clearly, each vertex has degree exactly $$$2$$$, and the graph has a perfect matching, given by pairs $$$(i, i+n)$$$, so it must consist only of even cycles, so it's bipartite. Just color the graph in two colors and output the colors of nodes $$$0,1,\ldots,n-1$$$. CodeI am not clear with the reason why meeting cell coordinates have to be between 1<x<n and 1<y<m , as the speeds are different ain't it possible that Lahub starts in 1,1 and Lahubina comes till 1,1 without Lahub moving?
Same question here.
It would be of immense help if fchirica could answer this.