


Всем привет! Как вы уже, наверно, знаете (если не знаете — то советую узнать), в двумерной геометрии весьма удобно использовать комплексные числа для задания точек и вращений. Сейчас я хочу рассказать вам о похожей конструкции, которая позволяет эффективно работать с геометрией пространства, в частности, задавать векторы и проводить над ними линейные операции (сложение, умножение на число), считать многие известные операции над векторами и осуществлять вращения в трехмерном пространстве.
Пусть  — векторы в трехмерном пространстве. В статье будут использоваться следующие обозначения из аналитической геометрии:
— векторы в трехмерном пространстве. В статье будут использоваться следующие обозначения из аналитической геометрии:
Скалярное произведение:
 , где
, где  — угол между векторами
— угол между векторами  и
и  в плоскости, которая их содержит,
в плоскости, которая их содержит,  — длина вектора .
— длина вектора .Векторное произведение:
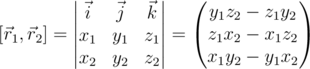 , где
, где  — единичные вектора, направленные вдоль осей
— единичные вектора, направленные вдоль осей  ,
,  и
и  соответственно. В пространстве векторное произведение имеет длину
соответственно. В пространстве векторное произведение имеет длину  и направлено перпендикулярно плоскости этих векторов таким образом, что если смотреть с вершины векторного произведения, кратчайший поворот от вектора к вектору происходит против часовой стрелки.
и направлено перпендикулярно плоскости этих векторов таким образом, что если смотреть с вершины векторного произведения, кратчайший поворот от вектора к вектору происходит против часовой стрелки.
Итак, кватернион — это гиперкомплексное число, которое может быть представлено в виде  , где
, где  — действительные числа, а
— действительные числа, а  — мнимые единицы. На кватернионах может быть введена операция умножения, которая задана тождеством
— мнимые единицы. На кватернионах может быть введена операция умножения, которая задана тождеством  . Из этого тождества может быть выведена вся таблица умножения кватернионных единиц:
. Из этого тождества может быть выведена вся таблица умножения кватернионных единиц:
Полагая кватернионное умножение дистрибутивным относительно сложения (т.е.  ), мы можем умножать кватернионы, "раскрывая скобки". Заметим, что кватернионное умножение будет ассоциативным (
), мы можем умножать кватернионы, "раскрывая скобки". Заметим, что кватернионное умножение будет ассоциативным ( ), но в общем случае не коммутативным (существуют
), но в общем случае не коммутативным (существуют  такие, что
такие, что  ).
).
Кватернионы можно представлять в виде  , где
, где  — вектор трёхмерного пространства с единичными направляющими векторами . Компоненты
— вектор трёхмерного пространства с единичными направляющими векторами . Компоненты  и
и  называются соответственно скалярной и векторной составляющими кватерниона. Пусть у нас есть кватернионы
называются соответственно скалярной и векторной составляющими кватерниона. Пусть у нас есть кватернионы  и
и  . Тогда их произведение можно посчитать как
. Тогда их произведение можно посчитать как  . Рассмотрим подробнее умножение двух чисто векторных кватернионов.
. Рассмотрим подробнее умножение двух чисто векторных кватернионов.

 .
.
Заметим, что это можно кратко переписать как  . Таким образом, окончательно получаем формулу для произведения кватернионов:
. Таким образом, окончательно получаем формулу для произведения кватернионов:

Наконец, обратим внимание, что, т.к.  , кватернион
, кватернион  может также быть задан в виде
может также быть задан в виде  , где
, где  — комплексные числа. Заметим, что, т.к.
— комплексные числа. Заметим, что, т.к.  , имеет место
, имеет место  или, вводя запись
или, вводя запись  :
:  . Отсюда следует, что произведение кватернионов
. Отсюда следует, что произведение кватернионов  и
и  может быть записано как
может быть записано как  . Число , введённое выше называют сопряжённым к комплексному числу
. Число , введённое выше называют сопряжённым к комплексному числу  . Именно эта формула для умножения кватернионов в силу своей простоты и краткости будет взята за основу в реализации кватернионов. Итак, ещё одна формула для умножения кватернионов:
. Именно эта формула для умножения кватернионов в силу своей простоты и краткости будет взята за основу в реализации кватернионов. Итак, ещё одна формула для умножения кватернионов:

Покажем, что любой ненулевой кватернион обратим, то есть, для любого кватерниона  существует обратный
существует обратный  такой что
такой что  . В таком случае мы сможем ввести деление как умножение на обратный элемент. По аналогии с комплексными числами можно рассмотреть для кватерниона
. В таком случае мы сможем ввести деление как умножение на обратный элемент. По аналогии с комплексными числами можно рассмотреть для кватерниона  кватернион
кватернион  , который назовём сопряжённым к нему. Из выведенной выше формулы произведения можно видеть, что
, который назовём сопряжённым к нему. Из выведенной выше формулы произведения можно видеть, что  . Таким образом, мы можем ввести для кватернионов норму (обобщённую длину)
. Таким образом, мы можем ввести для кватернионов норму (обобщённую длину)  и обратный элемент
и обратный элемент  . Обратим внимание на то, что
. Обратим внимание на то, что  . Действительно, из формулы умножения прямо следует
. Действительно, из формулы умножения прямо следует  . Отсюда сразу следует, что
. Отсюда сразу следует, что  и
и  .
.
Теперь разберёмся с наиболее важным свойством кватернионов — заданием вращений трехмерного пространства. Здесь и далее будем считать векторы кватернионами с нулевой скалярной частью. Введём операцию сопряжения вектора a кватернионом g, результатом которой является вектор[1]  . Это равенство эквивалентно тому, что
. Это равенство эквивалентно тому, что  . Пусть
. Пусть  , тогда, расписывая, получаем
, тогда, расписывая, получаем  . Рассматривая отдельно скалярные и векторные части, получаем:
. Рассматривая отдельно скалярные и векторные части, получаем:
Обратим внимание, что в силу мультипликативности нормы кватернионов, нормы векторов  и
и  равны. Первое уравнение системы означает, что равны также их ортогональные проекции на ось . Множество концов векторов с постоянной нормой и проекцией на некоторое направление образуют окружность вокруг данного направления. Отсюда необходимо следует, что получается из поворотом вокруг на некоторый угол. Найдём его. Далее будем говорить, что вращение происходит по или против часовой стрелки в соответствии с тем, как оно выглядит, если смотреть из конца вектора, вокруг которого оно происходит.
равны. Первое уравнение системы означает, что равны также их ортогональные проекции на ось . Множество концов векторов с постоянной нормой и проекцией на некоторое направление образуют окружность вокруг данного направления. Отсюда необходимо следует, что получается из поворотом вокруг на некоторый угол. Найдём его. Далее будем говорить, что вращение происходит по или против часовой стрелки в соответствии с тем, как оно выглядит, если смотреть из конца вектора, вокруг которого оно происходит.
Будем считать, что  . Если это не так, разделим
. Если это не так, разделим  на квадратный корень из его нормы, на векторе это не отразится. Теперь мы можем считать, что
на квадратный корень из его нормы, на векторе это не отразится. Теперь мы можем считать, что  , где
, где  . Также пользуясь первым уравнением системы и вводя обозначения
. Также пользуясь первым уравнением системы и вводя обозначения  и
и  , мы можем преобразовать второе уравнение следующим образом:
, мы можем преобразовать второе уравнение следующим образом:  . (С одной стороны мы вычли с обеих сторон
. (С одной стороны мы вычли с обеих сторон  , с другой, т.к.
, с другой, т.к.  имеем
имеем  )
)
Обратим внимание на то, что  и
и  лежат в одной плоскости, ортогональной вектору , то есть, в плоскости вращения. Нам остаётся лишь заметить, что
лежат в одной плоскости, ортогональной вектору , то есть, в плоскости вращения. Нам остаётся лишь заметить, что  — это вектор , повернутый на
— это вектор , повернутый на  вокруг вектора
вокруг вектора  по часовой стрелке. Таким образом, левая часть равенства задаёт вектор , повернутый вокруг по часовой стрелке на , а правая — вектор , повернутый вокруг против часовой стрелки на . Отсюда окончательно получаем, что вектор является повернутым вокруг вектора против часовой стрелки на угол
по часовой стрелке. Таким образом, левая часть равенства задаёт вектор , повернутый вокруг по часовой стрелке на , а правая — вектор , повернутый вокруг против часовой стрелки на . Отсюда окончательно получаем, что вектор является повернутым вокруг вектора против часовой стрелки на угол  вектором .
вектором .
Подводя некоторый итог, мы приходим к наиболее значимому выводу этой статьи: кватернион с единичной нормой вида
 обладает тем свойством, что для любого вектора выражение
обладает тем свойством, что для любого вектора выражение  задаёт вектор , повёрнутый вокруг на градусов против часовой стрелки.
задаёт вектор , повёрнутый вокруг на градусов против часовой стрелки.[1]  . Скалярная часть этого произведения равна
. Скалярная часть этого произведения равна  .
.
Теперь приведём реализацию. Она исключительно олимпиадная и сделана с уклоном на простоту воспроизведения. Ideone: #BBOx9H
// Для начала введём обозначения для класса и его элементов, которыми мы будем пользоваться.
typedef double ftype;
typedef complex<ftype> point;
typedef complex<point> quater;
#define qA real()
#define qB imag()
#define qs qA.real()
#define qx qA.imag()
#define qy qB.real()
#define qz qB.imag()
// Умножение по формулам для комплексных чисел.
quater operator * (quater a, quater b)
{
return {{a.qA * b.qA - a.qB * conj(b.qB)},
{a.qA * b.qB + a.qB * conj(b.qA)}};
}
// Сопряжённый элемент.
quater conj(quater a)
{
return {conj(a.qA), - a.qB};
}
// Кватернионная норма.
ftype norm(quater a)
{
return (a * conj(a)).qs;
}
// Длина.
ftype abs(quater a)
{
return sqrt(norm(a));
}
// Деление с помощью обратного элемента.
quater operator / (quater a, quater b)
{
return a * conj(b) / point(norm(b));
}
// Кватернион по координатам вектора.
quater vec(ftype x, ftype y, ftype z)
{
return {{0, x}, {y, z}};
}
// Базисные вектора пространства.
const quater ex = vec(1, 0, 0);
const quater ey = vec(0, 1, 0);
const quater ez = vec(0, 0, 1);
// Векторная часть кватерниона.
quater vec(quater a)
{
return a -= a.qs;
}
// Скалярное произведение.
ftype dot(quater a, quater b)
{
return -(a * b).qs;
}
// Векторное произведение.
quater cross(quater a, quater b)
{
return vec(a * b);
}
// Смешанное произведение.
ftype mix(quater a, quater b, quater c)
{
return dot(a, cross(b, c));
}
// Сопряжение вектора a кватернионом g.
quater conj(quater a, quater g)
{
return g * a / g;
}
// Кватернион, задающий вращение вокруг i на phi против часовой стрелки.
quater rotation(quater i, ftype phi)
{
return point(cos(phi / 2)) + i * point(sin(phi / 2));
}
// Вращать a вокруг i на phi против часовой стрелке.
quater rotate(quater a, quater i, ftype phi)
{
return conj(a, rotation(i, phi));
}
// Кватернион, задающий вращение от a к b по минимальному углу.
quater min_rotation(quater a, quater b)
{
a /= abs(a);
b /= abs(b);
return conj(a * (a + b));
}
// Угол вращения, который задаёт кватернион от 0 до 2*pi.
ftype get_angle(quater a)
{
a /= abs(a);
return 2 * acos(a.qs);
}
// Кватернион, задающий вращение, совмещающее ось x с nx, ось y с ny и ось z с [nx, ny].
quater basis_rotation(quater nx, quater ny)
{
return min_rotation(conj(ey, min_rotation(ex, nx)), ny);
}
Недостатки:
complex<complex<double>>— unspecified behavior. В приведённой реализации из класса без перегрузки используются только линейные операции и это должно работать в любой разумной реализацииcomplex<>, но всё же стоит помнить об этой особенности.Наиболее простой способ умножить кватернион на вещественное число в такой реализации — сперва привести это число к
complex<double>.
P.S. С моей точки зрения, must-have набор для 3D-геометрии выглядит именно так, а остальное уже из него выводится. Если хотите видеть здесь какие-нибудь ещё функции трехмерной геометрии, пишите в комментариях. И вообще если есть какие-нибудь советы, жалобы или задачи, которые было бы неплохо решить кватернионами, пишите их :)



